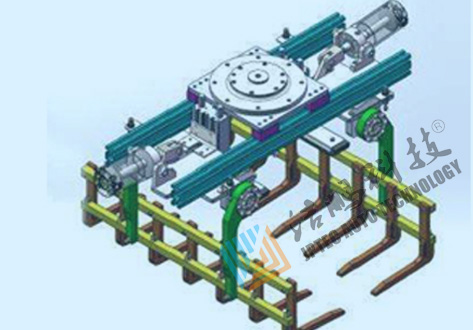



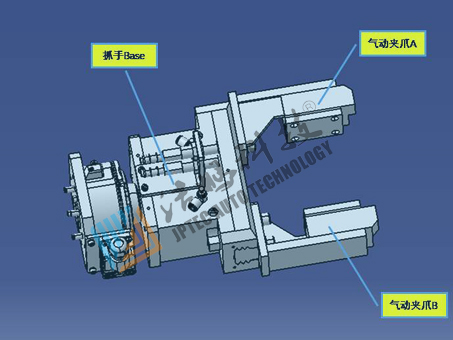
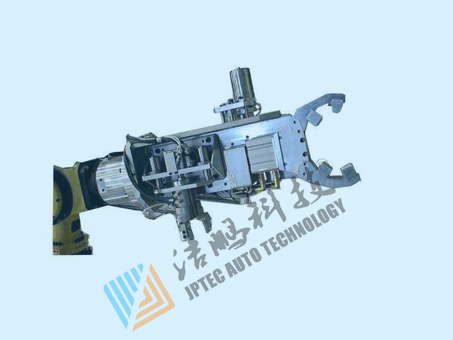
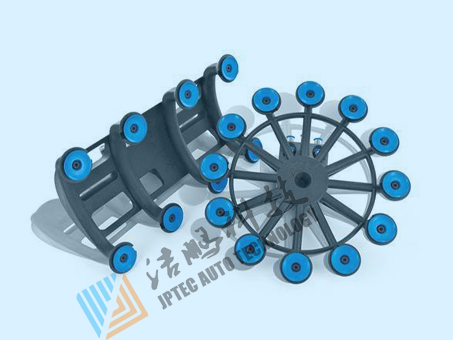
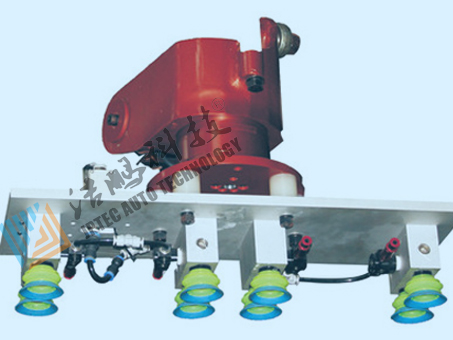


According to the different shapes of the workpieces held by the robot, the robot gripper can be divided into three types: mechanical gripper, also known as mechanical clamp, including two fingers, three fingers and deformation fingers; special gripper including magnetic chuck, welding gun, etc.; general gripper, including two fingers to five fingers.
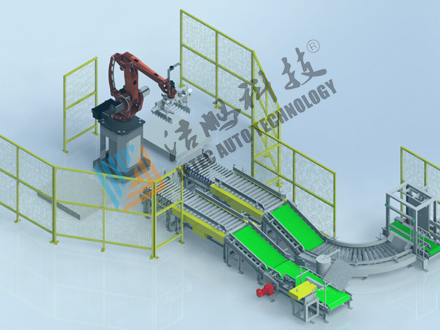
Robot hand grip is also called pneumatic robot hand. It can be loose and tight through air pressure control. It's very flexible and convenient. It can grasp objects of different weight and smoothness. It can replace hands in many places. Why should silica gel be used? Robot hand grip material is also special. It has strong tear resistance and tensile resistance. It can withstand certain air pressure, is not easy to crack and spring Good flexibility. Simple operation process, long service life, environmental protection, non-toxic and odorless.
根据机器人所握持的工件形状不同,机器人手抓可分为多种类型,主要可分为三类:机械手爪,又称为机械夹钳,包括2指、3指和变形指;包括磁吸盘、焊枪等的特殊手爪;通用手爪,包括2指到5指。
机器人手抓又叫做气动机器手,通过气压控制动作,可松可紧,非常的灵活方便,可抓取不同轻重,光滑程度的物品,很多地方能够取代人手,为什么要用硅胶材料呢,机器人手抓材料也是特殊的,具备很强的抗撕抗拉的应能,能够承受一定的气压,不易破裂,弹性好,柔韧度也好。操作工艺简单,使用寿命长,环保无毒无气味。